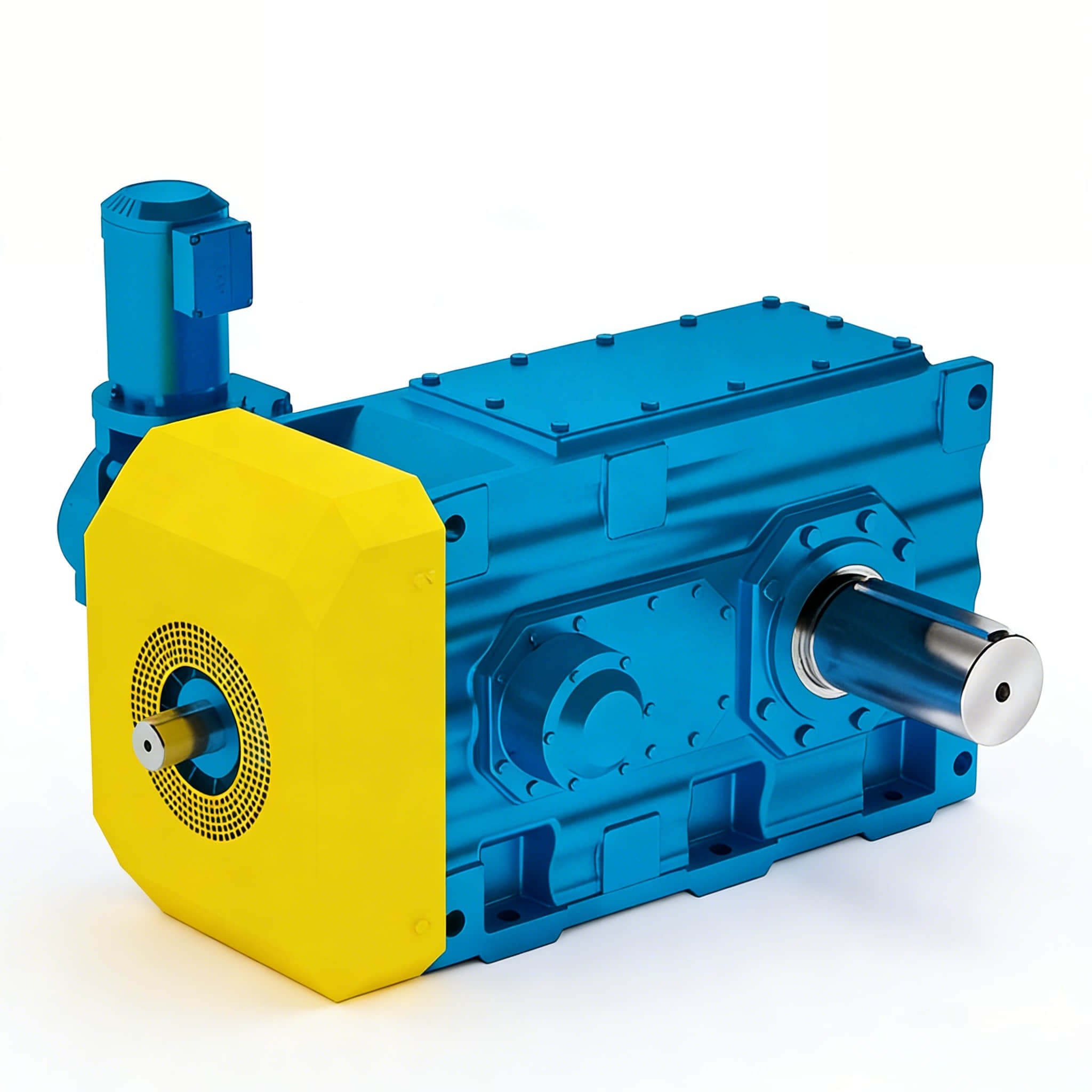
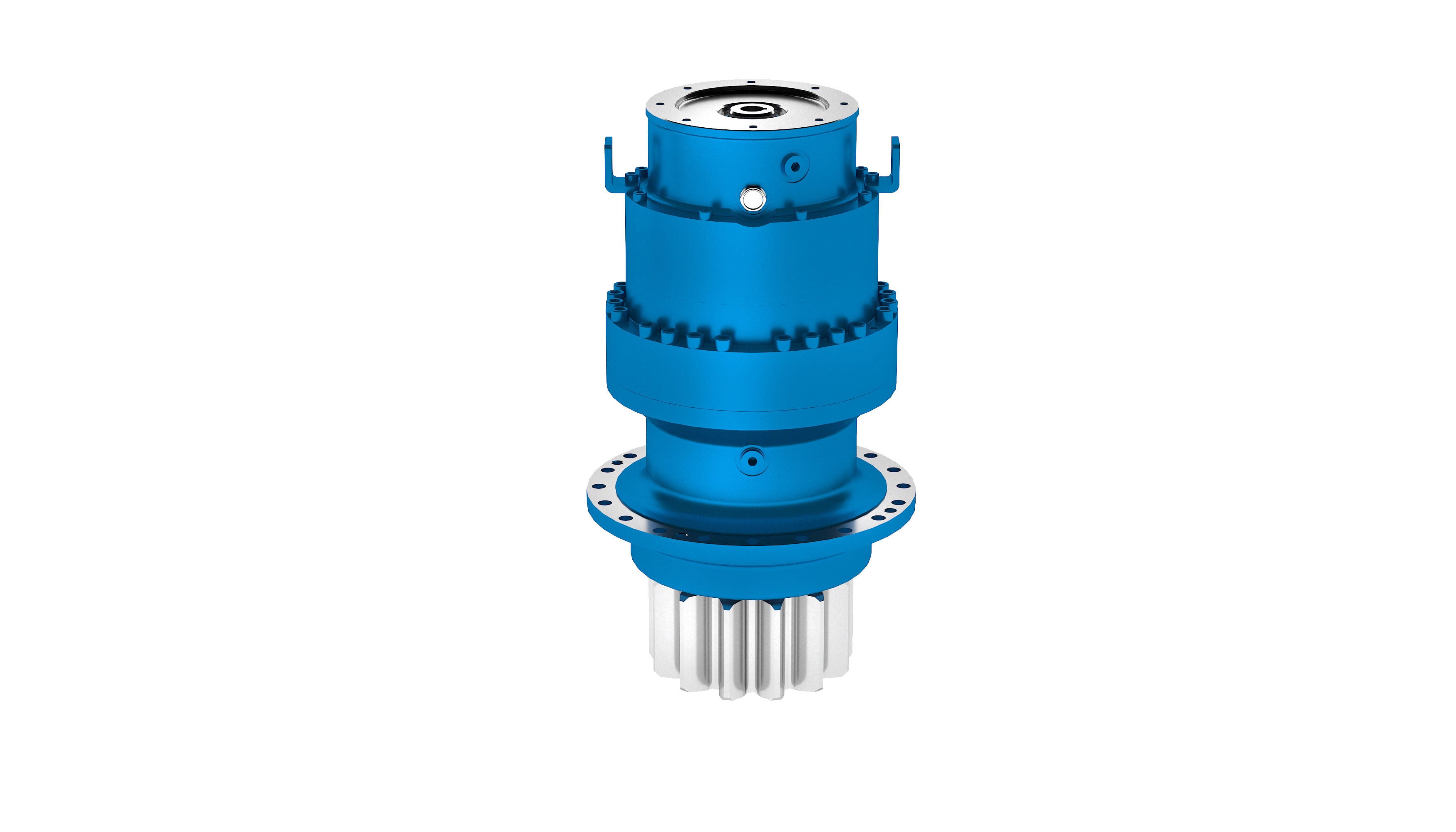
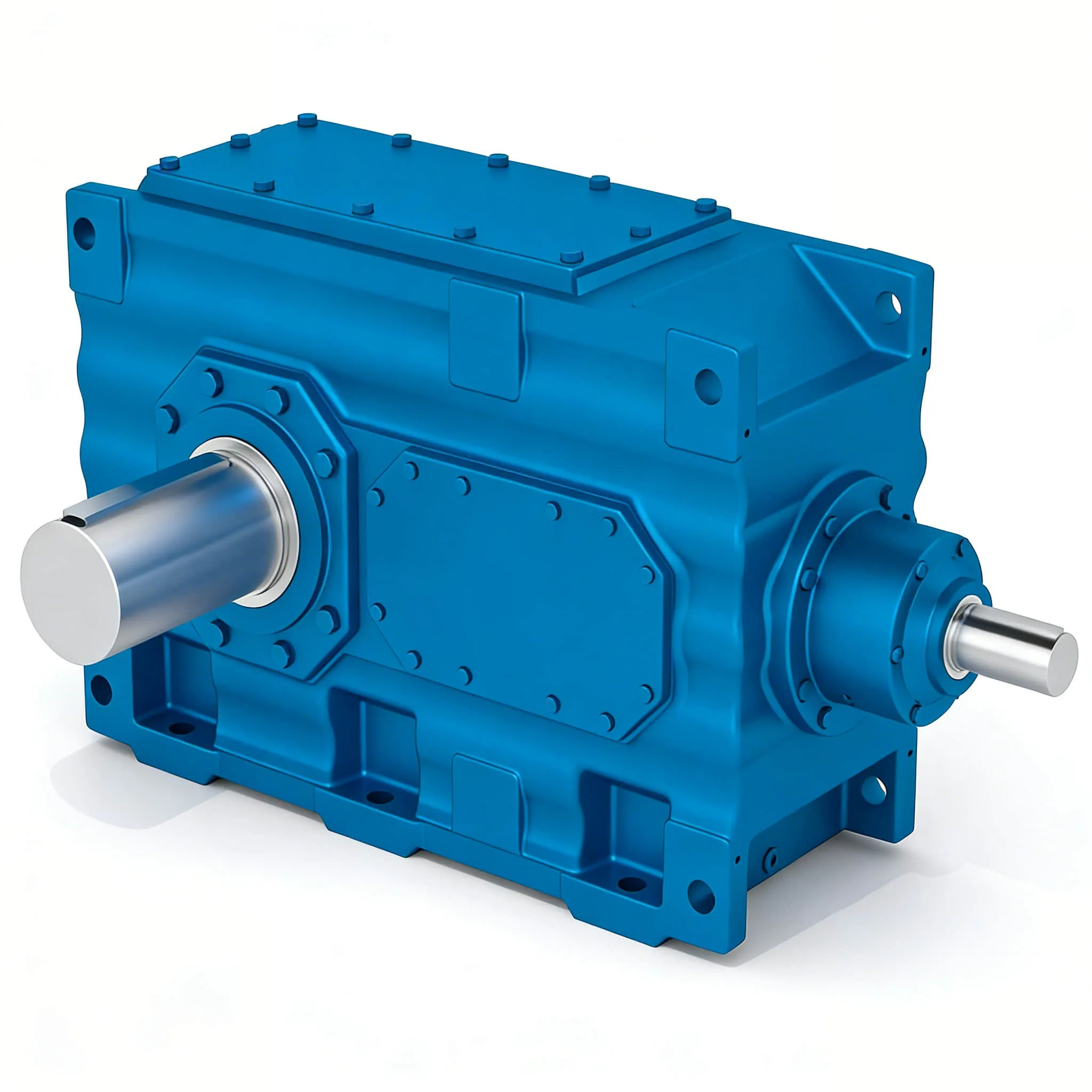
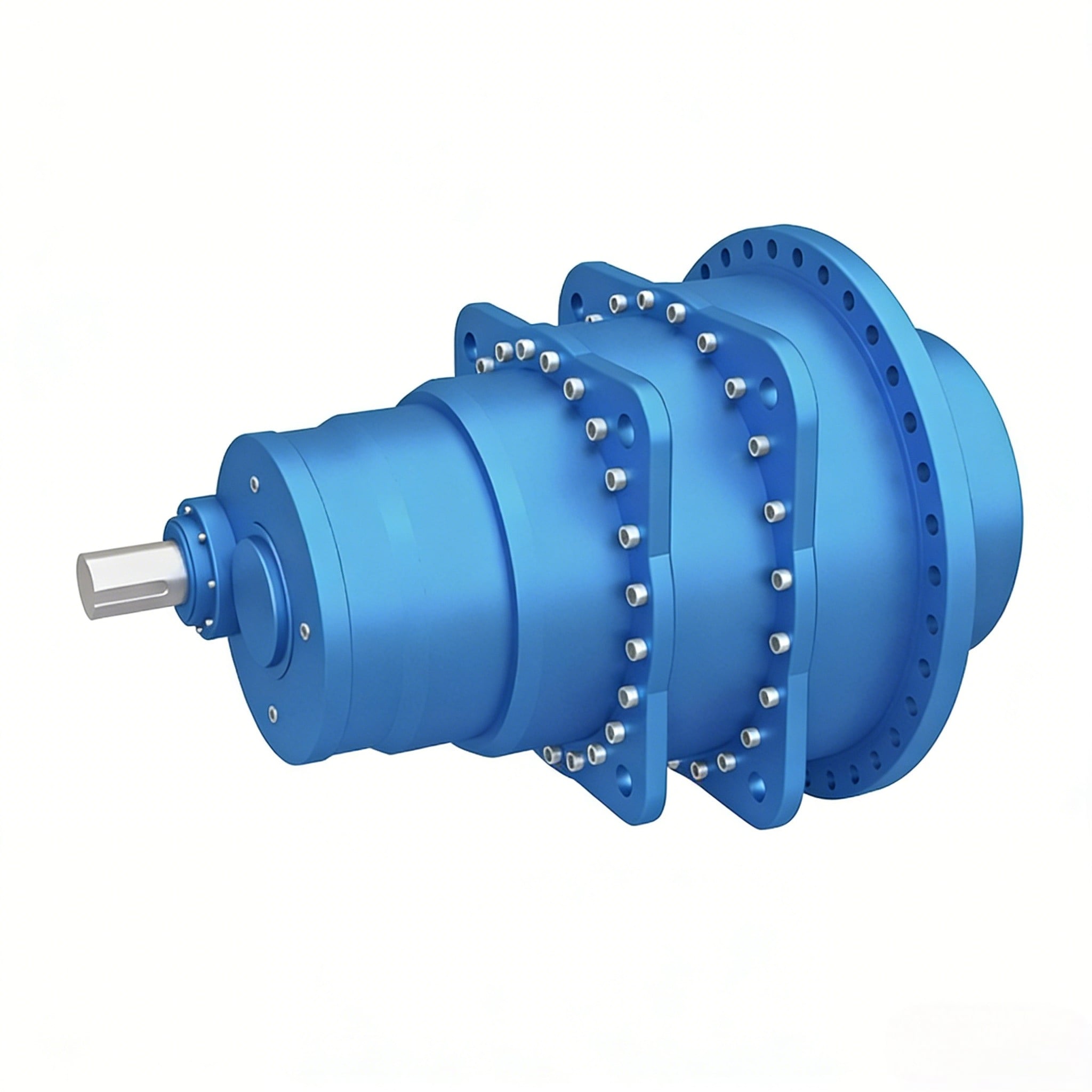
კოაქსიალური გეარბოქსი
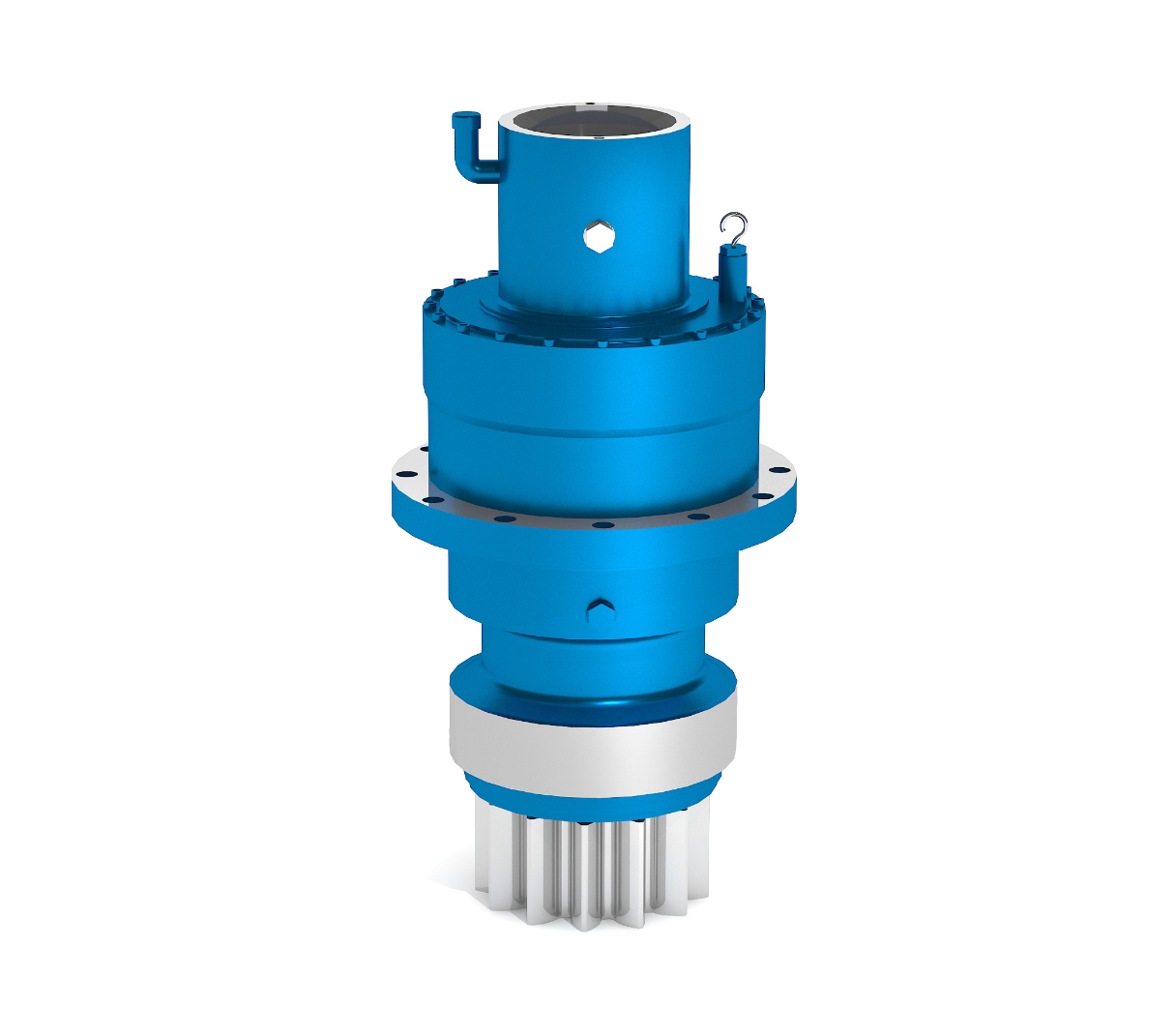
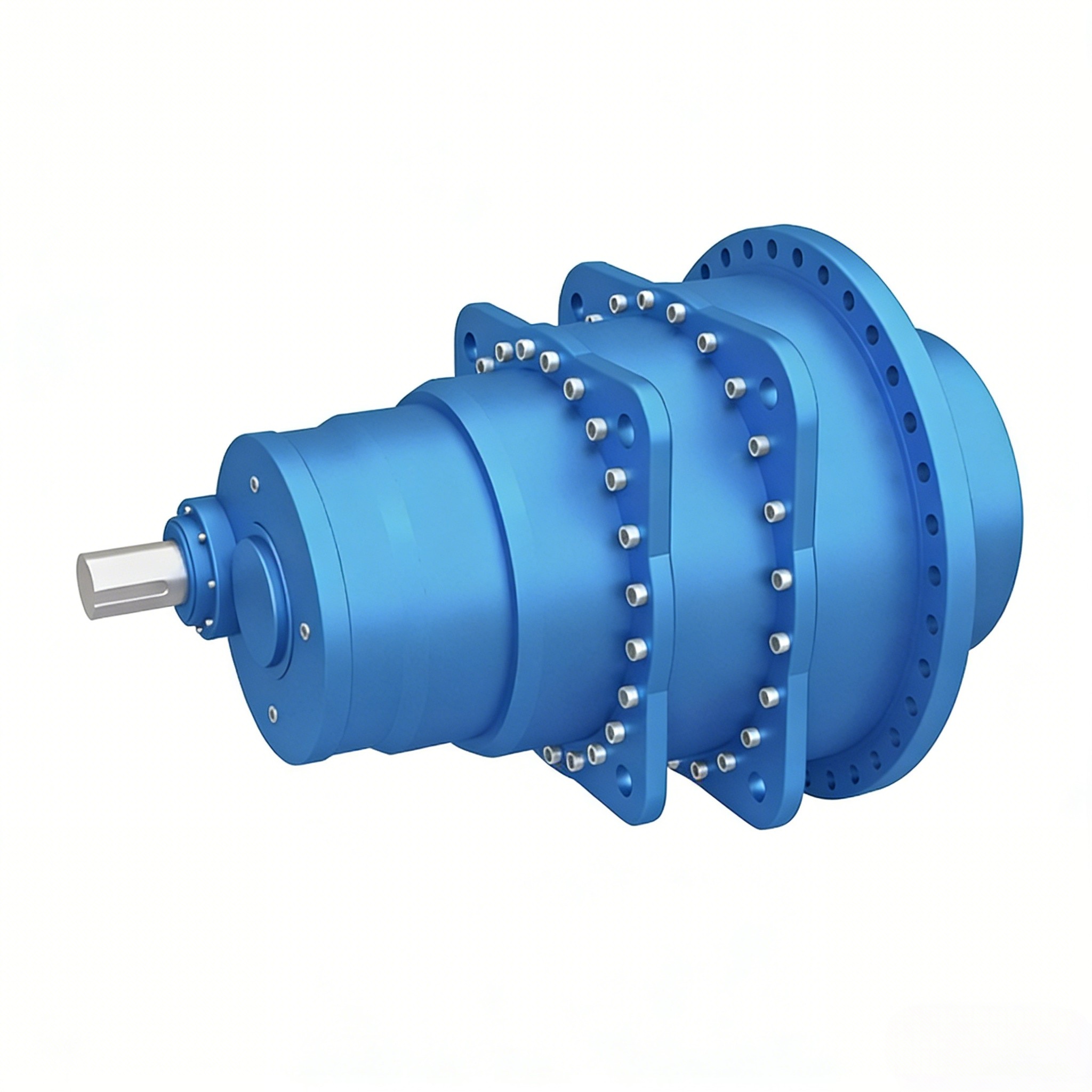
Კოაქსიალური გეარბოქსი წარმოადგენს სრულყოფილ მეхანიკურ ტრანსმისიის სისტემას, სადაც შემავალი და გამომავალი ვალები მდებარეობენ ერთი და იმავე ღერძზე, რაც უზრუნველყოფს კომპაქტურ და ეფექტურ ძალის გადაცემის ამოხსნას. ეს ინოვაციური დიზაინი აცილებს დამატებითი კავშირების მექანიზმების საჭიროებას და ამცირებს სისტემის სრულ სირთულეს, ხოლო ერთდროულად შენარჩუნებს განსაკუთრებულ სამუშაო სტანდარტებს. კოაქსიალური გეარბოქსი მუშაობს რამდენიმე გეარის სტუფენის გამოყენებით, რომლებიც კონცენტრულად არის განლაგებული ცენტრალური ღერძის გარშემო, რაც საშუალებას აძლევს ტორქის გამრავლებასა და სიჩქარის შემცირებას შედარებით მცირე სივრცეში. კოაქსიალური გეარბოქსის ძირითადი ფუნქციები მოიცავს სიჩქარის სწორ რეგულირებას, ტორქის გაძლიერებას და როტაციული მოძრაობის მიმართულების შეცვლას. ეს მოწყობილობები მნიშვნელოვან კომპონენტებს წარმოადგენენ იმ აპლიკაციებში, სადაც სჭირდება სწორი პოზიციონირება და უწყვეტი ძალის მიწოდება. კოაქსიალური გეარბოქსის ტექნოლოგიური მახასიათებლები მოიცავს განვითარებულ საყრდენ სისტემებს, რომლებიც ერთდროულად უკავშირდებიან რადიალურ და აქსიალურ ტვირთებს, სიზუსტით დამუშავებულ გეარის კბილებს მინიმალური ბექლაშის გარანტირების მიზნით და მძლავრ სახურავის დიზაინს, რომელიც შიგა კომპონენტებს გარემოს ფაქტორებისგან იცავს. ბევრი თანამედროვე კოაქსიალური გეარბოქსის სისტემა შეიცავს დახურულ სითხის კამერებს, რომლებიც გაზრდის ექსპლუატაციის ხანგრძლივობას და ამცირებს მომსახურების საჭიროებას. კოაქსიალური გეარბოქსების გამოყენების სფეროები მოიცავს რამდენიმე საინდუსტრო დარგს, მათ შორის რობოტიკას, ავტომატიზაციის მოწყობილობებს, მედიცინის მოწყობილობებს, აეროკოსმოსურ სისტემებს და სიზუსტის მწარმოებლობის მანქანებს. რობოტულ აპლიკაციებში კოაქსიალური გეარბოქსი საშუალებას აძლევს სწორად მოძრავი სახსრების და ტვირთის მოსახელებლად მუშაობის შესაძლებლობას. წარმოების მოწყობილობები იღებენ სარგებელს მუდმივი ძალის გადაცემის მახასიათებლებიდან, რაც უზრუნველყოფს პროდუქტის ხარისხს და წარმოების ეფექტურობას. მედიცინის მოწყობილობების აპლიკაციები ეყრდნობიან კოაქსიალური გეარბოქსის ტექნოლოგიის უწყვეტ მუშაობას და სანდოობას. აეროკოსმოსური ინდუსტრია ამ სისტემებს გამოიყენებს აქტუატორების მარეგულირებლებსა და პოზიციონირების მექანიზმებში, სადაც წონის შემცირება და სამუშაო მახასიათებლების ოპტიმიზაცია მთავარი მოთხოვნებია.